
(video) Toyota a organizat primul drift autonom în pereche. Scopul experimentului
Toyota Research Institute a publicat un videoclip în care arată ceea ce ar fi prima secvență de drift în tandem complet autonomă din lume. Mașinile s-au deplasat în derapaje sub controlul unui sistem electronic cu elemente de inteligență artificială, dezvoltat de Toyota cu participarea inginerilor de la Stanford Engineering. Dezvoltatorii se așteaptă ca succesul lor să contribuie la îmbunătățirea siguranței pe drumurile publice.
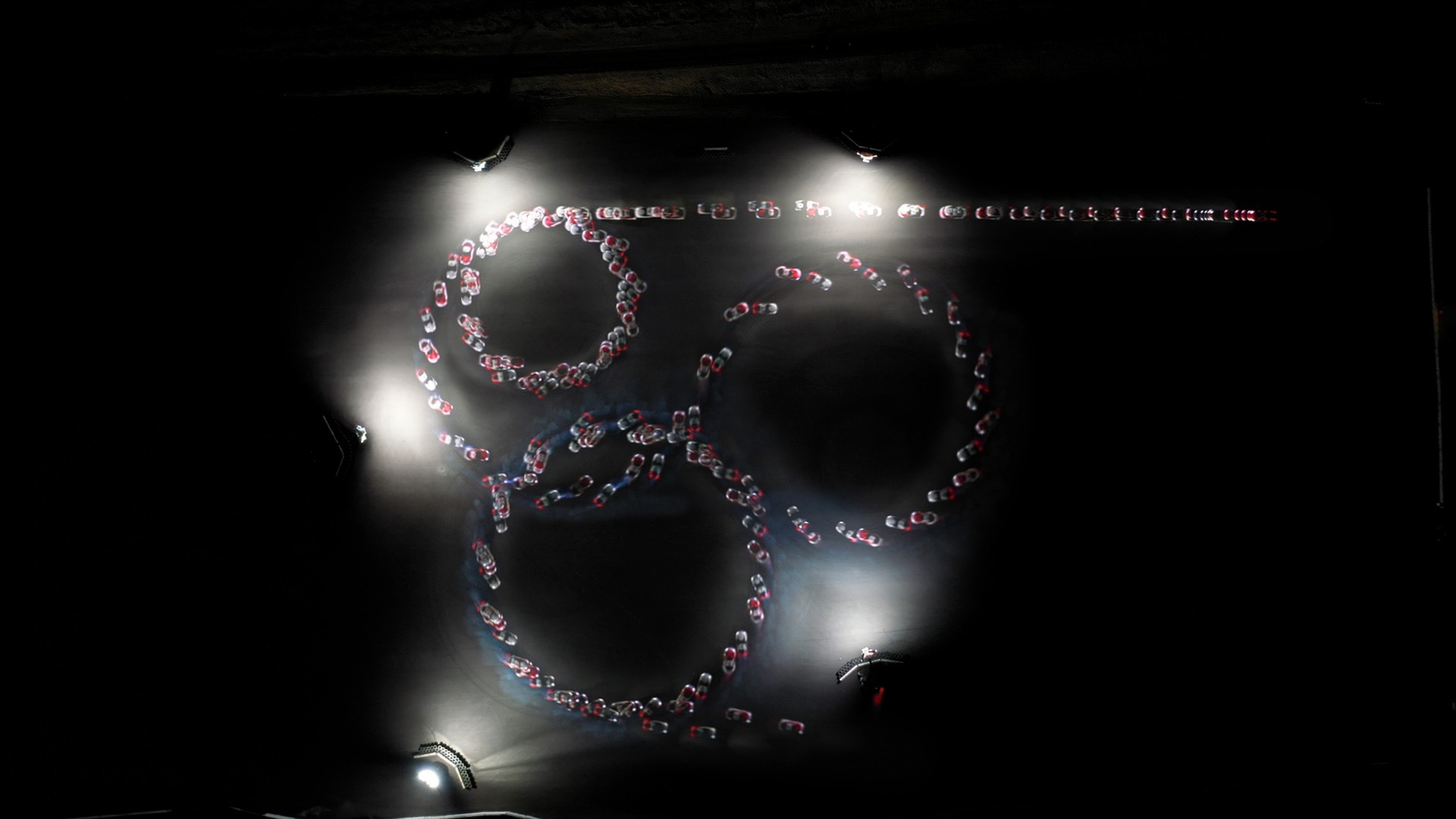
Videoclipul demonstrează în mod clar mișcarea a două mașini într-un derapaj controlat. A doua mașină repetă traiectoria primei și încearcă să rămână aproape de aceasta, în conformitate cu regulile general acceptate ale acestor curse. Totuși, la volan au stat piloți pentru orice eventualitate, deși nu au atins comenzile în timpul experimentului.
Membrii echipei tehnice povestesc că experimentul de succes a fost precedat de mai mulți ani de dezvoltare (aproape șapte), inclusiv de software deosebit de avansat
De exemplu, elementele de inteligență artificială din software-ul de control au fost utilizate pentru a-l învăța abilitățile de conducere în același mod în care oamenii învață să conducă – printr-o mulțime de antrenamente. În acest experiment, a doua mașină, după cum se observă în videoclip, a reacționat la mișcările primei în timp real.
„Punerea în practică a unei tehnologii inaccesibile anterior arată că este posibilă și generează noi idei care pot fi folosite pentru a schimba viitorul.”
Chris Gerdes, profesor de inginerie mecanică și co-director al Centrului de cercetare auto de la Stanford (CARS)
Având în vedere că driftul în pereche este considerat unul dintre cele mai complexe moduri de a conduce o mașină, participanții la proiect consideră că realizarea lor va contribui la creșterea inteligenței și siguranței transportului rutier standard în viitor. Echipa a utilizat tehnici moderne pentru a construi inteligența artificială a vehiculului, inclusiv un model de anvelope cu rețea neurală care i-a permis să învețe din experiență, la fel ca un șofer expert.
Toyota a prezentat prima experiență de drift autonom în 2022, însă atunci o singură mașină controlată electronic a participat. La acel moment, s-a afirmat că abilitatea asistenților de a controla mașinile în derapaj le-ar putea ajuta să iasă singure din derapaje pe drumuri alunecoase, de exemplu. Acum, prin adăugarea unei a doua mașini care face drift în tandem, echipele au simulat mai bine condițiile dinamice în care mașinile trebuie să reacționeze rapid la alte vehicule, pietoni și bicicliști.
Accidentele auto provoacă anual peste 40.000 de decese în SUA și aproximativ 1.35 milioane de decese în întreaga lume. Multe dintre aceste incidente se datorează pierderii controlului vehiculului în situații bruște și dinamice. Autonomia este extrem de promițătoare pentru a ajuta șoferii să reacționeze corect.
„Atunci când mașina dumneavoastră începe să derapeze sau să alunece, vă bazați exclusiv pe abilitățile dumneavoastră de conducere pentru a evita coliziunea cu un alt vehicul, copac sau obstacol. Un șofer obișnuit se luptă să gestioneze aceste circumstanțe extreme, iar o fracțiune de secundă poate însemna diferența dintre viață și moarte. Această nouă tehnologie poate interveni exact la timp pentru a proteja un șofer și a gestiona o pierdere de control, la fel cum ar face un drifter expert.
Cercetătorii noștri s-au reunit cu un singur obiectiv în minte – cum să facă condusul mai sigur. Acum, utilizând cele mai recente instrumente în domeniul inteligenței artificiale, putem conduce două mașini în tandem în mod autonom. Este cea mai complexă manevră din sporturile cu motor, iar atingerea acestei etape cu autonomie înseamnă că putem controla dinamic mașinile la extreme. Acest lucru are implicații de anvergură pentru construirea de sisteme de siguranță avansate în viitoarele automobile.”
Avinash Balachandran, vicepreședinte al diviziei TRI Human Interactive Driving








Detalii tehnice
- Experimentele au fost efectuate la Thunderhill Raceway Park din Willows, California, folosind două GR Supra modificate. Algoritmii mașinii principale au fost dezvoltați la TRI, în timp ce inginerii Stanford i-au dezvoltat pe cei ai mașinii secundare.
- TRI s-a concentrat pe dezvoltarea unor mecanisme de control robuste și stabile pentru mașina principală. Asta i-a permis facă curse de conducere repetabile și sigure.
- Inginerii de la Stanford au dezvoltat modele și algoritmi AI care permit mașinii de urmărire să se adapteze dinamic la mișcarea mașinii principale. Astfel, poate derapa alături de aceasta fără a se ciocni.
- GReddy și Toyota Racing Development (TRD) au modificat suspensia, motorul, transmisia și sistemele de siguranță ale fiecărei mașini (de exemplu, cușca de protecție, sistemul de stingere a incendiilor). Deși sunt subtil diferite între ele, vehiculele au fost construite după aceleași specificații utilizate în competițiile Formula Drift pentru a ajuta echipele să colecteze date cu piloți experți într-un mediu controlat.
- Ambele sunt echipate cu computere și senzori care le permit să controleze direcția, accelerația și frânele, detectând în același timp mișcarea (de exemplu, poziția, viteza și rata de rotație).
- În mod esențial, ele împart o rețea Wi-Fi dedicată care le permite să comunice în timp real prin schimbul de informații, cum ar fi pozițiile lor relative și traiectoriile planificate.
- Pentru a realiza driftul autonom în tandem, vehiculele trebuie să își planifice în permanență comenzile de direcție, accelerație și frânare, precum și traiectoria pe care intenționează să o urmeze, utilizând o tehnică numită Nonlinear Model Predictive Control (NMPC).
- În NMPC, fiecare vehicul începe cu obiective, reprezentate matematic ca reguli sau constrângeri cărora trebuie să li se supună.
- Obiectivul vehiculului fruntaș este de a menține un derapaj de-a lungul unei traiectorii dorite, respectând în același timp constrângerile legilor fizicii și limitele hardware, cum ar fi unghiul maxim de virare.
- Obiectivul vehiculului secund este să se deplaseze în derapaj alături de vehiculul principal, evitând în același timp în mod proactiv coliziunea.
- Fiecare vehicul rezolvă și re-rezolvă apoi o problemă de optimizare de până la 50 de ori pe secundă pentru a decide ce comenzi de direcție, accelerație și frânare îi îndeplinesc cel mai bine obiectivele, răspunzând în același timp la condițiile care se schimbă rapid.
- Prin utilizarea inteligenței artificiale pentru antrenarea constantă a rețelei neuronale cu ajutorul datelor din testele anterioare, vehiculele se îmbunătățesc la fiecare deplasare pe pistă.
Cmentariile sunt închise